تعارف
1960 کی دہائی کے آخر اور 1970 کی دہائی کے اوائل سے، زیادہ تر روایتی فضائی فوٹو گرافی کے نظام کو ہوائی اور ایرو اسپیس الیکٹرو آپٹیکل اور الیکٹرانک سینسر سسٹمز نے تبدیل کر دیا ہے۔ جب کہ روایتی فضائی فوٹو گرافی بنیادی طور پر مرئی روشنی کی طول موج میں کام کرتی ہے، جدید ہوائی اور زمین پر مبنی ریموٹ سینسنگ سسٹم ڈیجیٹل ڈیٹا تیار کرتے ہیں جو مرئی روشنی، منعکس اورکت، تھرمل انفراریڈ، اور مائیکرو ویو سپیکٹرل خطوں کا احاطہ کرتا ہے۔ فضائی فوٹو گرافی میں بصری تشریح کے روایتی طریقے اب بھی مددگار ہیں۔ پھر بھی، ریموٹ سینسنگ ایپلی کیشنز کی ایک وسیع رینج کا احاطہ کرتی ہے، بشمول اضافی سرگرمیاں جیسے ہدف کی خصوصیات کی نظریاتی ماڈلنگ، اشیاء کی سپیکٹرل پیمائش، اور معلومات نکالنے کے لیے ڈیجیٹل امیج تجزیہ۔
ریموٹ سینسنگ، جو کہ غیر رابطہ طویل فاصلے تکنیک کے تمام پہلوؤں کا حوالہ دیتی ہے، ایک ایسا طریقہ ہے جو برقی مقناطیسیت کا استعمال کرتے ہوئے کسی ہدف کی خصوصیات کا پتہ لگانے، ریکارڈ کرنے اور پیمائش کرنے کے لیے کرتا ہے اور اس کی تعریف پہلی بار 1950 کی دہائی میں تجویز کی گئی تھی۔ ریموٹ سینسنگ اور میپنگ کے شعبے میں، اسے 2 سینسنگ طریقوں میں تقسیم کیا گیا ہے: ایکٹو اور غیر فعال سینسنگ، جن میں سے Lidar سینسنگ فعال ہے، ہدف پر روشنی خارج کرنے اور اس سے منعکس ہونے والی روشنی کا پتہ لگانے کے لیے اپنی توانائی استعمال کرنے کے قابل ہے۔
ایکٹو لیدر سینسنگ اور ایپلی کیشن
Lidar (روشنی کا پتہ لگانا اور رینج کرنا) ایک ٹیکنالوجی ہے جو لیزر سگنل کے اخراج اور وصول کرنے کے وقت کی بنیاد پر فاصلے کی پیمائش کرتی ہے۔ کبھی کبھی Airborne LiDAR کو ہوائی لیزر سکیننگ، میپنگ، یا LiDAR کے ساتھ بدل کر لاگو کیا جاتا ہے۔
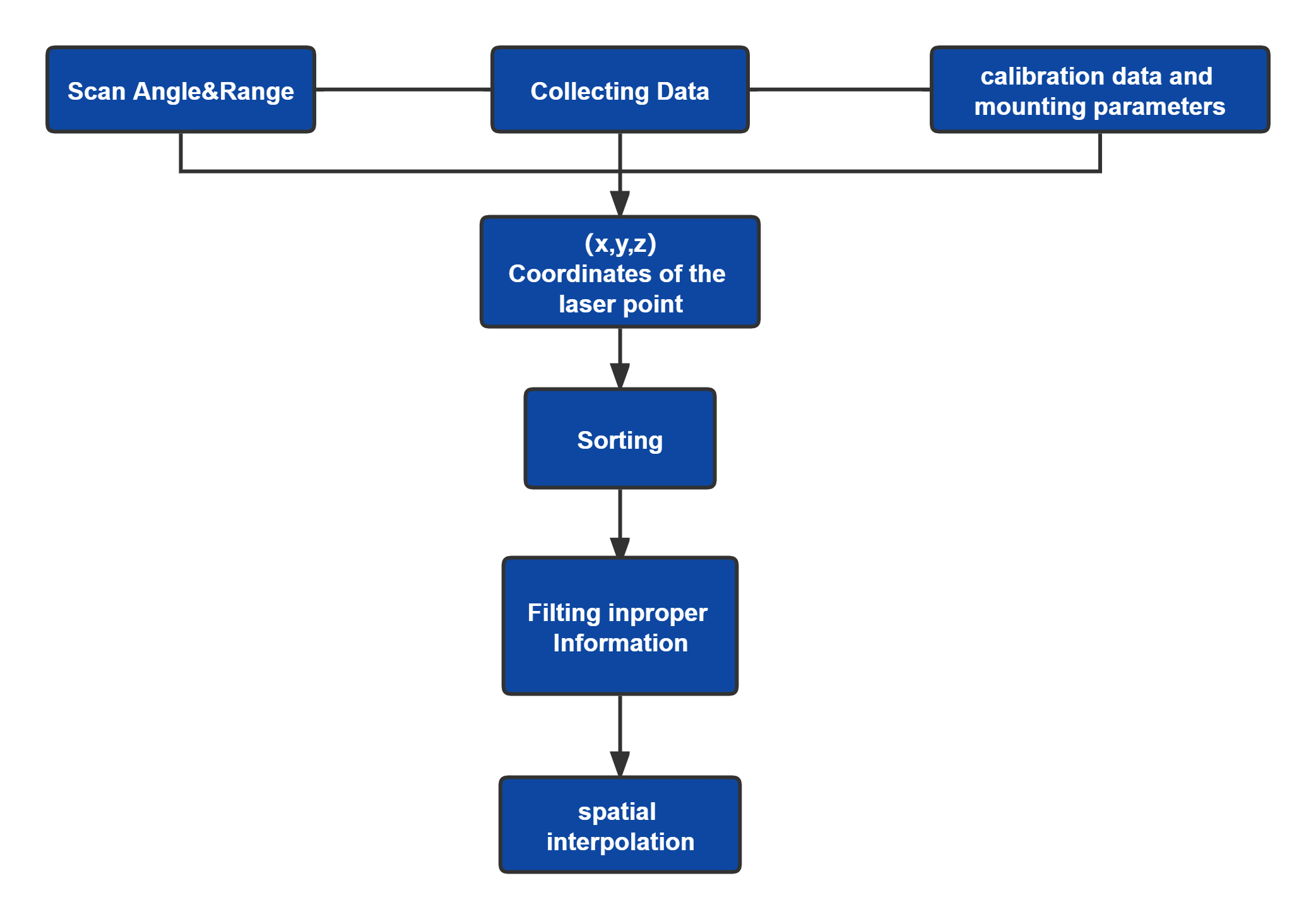
یہ ایک عام فلو چارٹ ہے جو LiDAR کے استعمال کے دوران پوائنٹ ڈیٹا پروسیسنگ کے اہم مراحل کو دکھاتا ہے۔ ( x, y, z) کوآرڈینیٹ جمع کرنے کے بعد، ان پوائنٹس کو چھانٹنا ڈیٹا رینڈرنگ اور پروسیسنگ کی کارکردگی کو بہتر بنا سکتا ہے۔ LiDAR پوائنٹس کی جیومیٹرک پروسیسنگ کے علاوہ، LiDAR فیڈ بیک کی شدت سے متعلق معلومات بھی مفید ہے۔
تمام ریموٹ سینسنگ اور میپنگ ایپلی کیشنز میں، LiDAR کو سورج کی روشنی اور دیگر موسمی اثرات سے آزاد زیادہ درست پیمائش حاصل کرنے کا الگ فائدہ ہے۔ ایک عام ریموٹ سینسنگ سسٹم دو حصوں پر مشتمل ہوتا ہے، ایک لیزر رینج فائنڈر اور پوزیشننگ کے لیے ایک پیمائشی سینسر، جو جغرافیائی ماحول کو 3D میں بغیر ہندسی تحریف کے براہ راست ناپ سکتا ہے کیونکہ کوئی امیجنگ شامل نہیں ہے (2D جہاز میں 3D دنیا کی تصویر کشی کی جاتی ہے)۔
ہمارے LIDAR کے کچھ ذرائع
سینسر کے لیے آنکھوں سے محفوظ LiDAR لیزر سورس چوائسز


